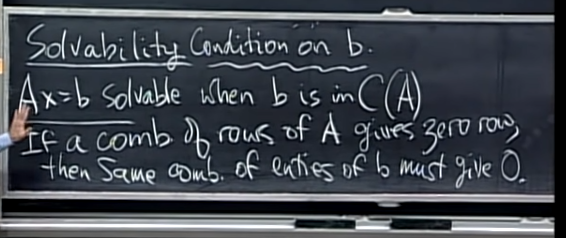
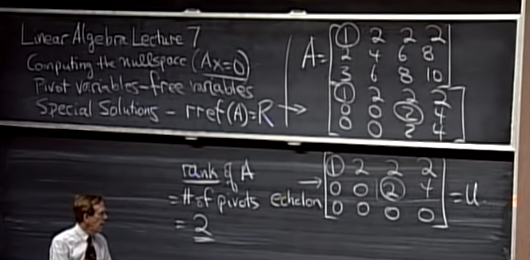
Lecture https://ocw.mit.edu/courses/18-06-linear-algebra-spring-2010/resources/lecture-8-solving-ax-b-row-reduced-form-r/ Lecture 8: Solving Ax = b: row reduced form R | Linear Algebra | Mathematics | MIT OpenCourseWare MIT OpenCourseWare is a web based publication of virtually all MIT course content. OCW is open and available to the world and is a permanent MIT activity ocw.mit.edu Note Ax=b의 솔..