반응형
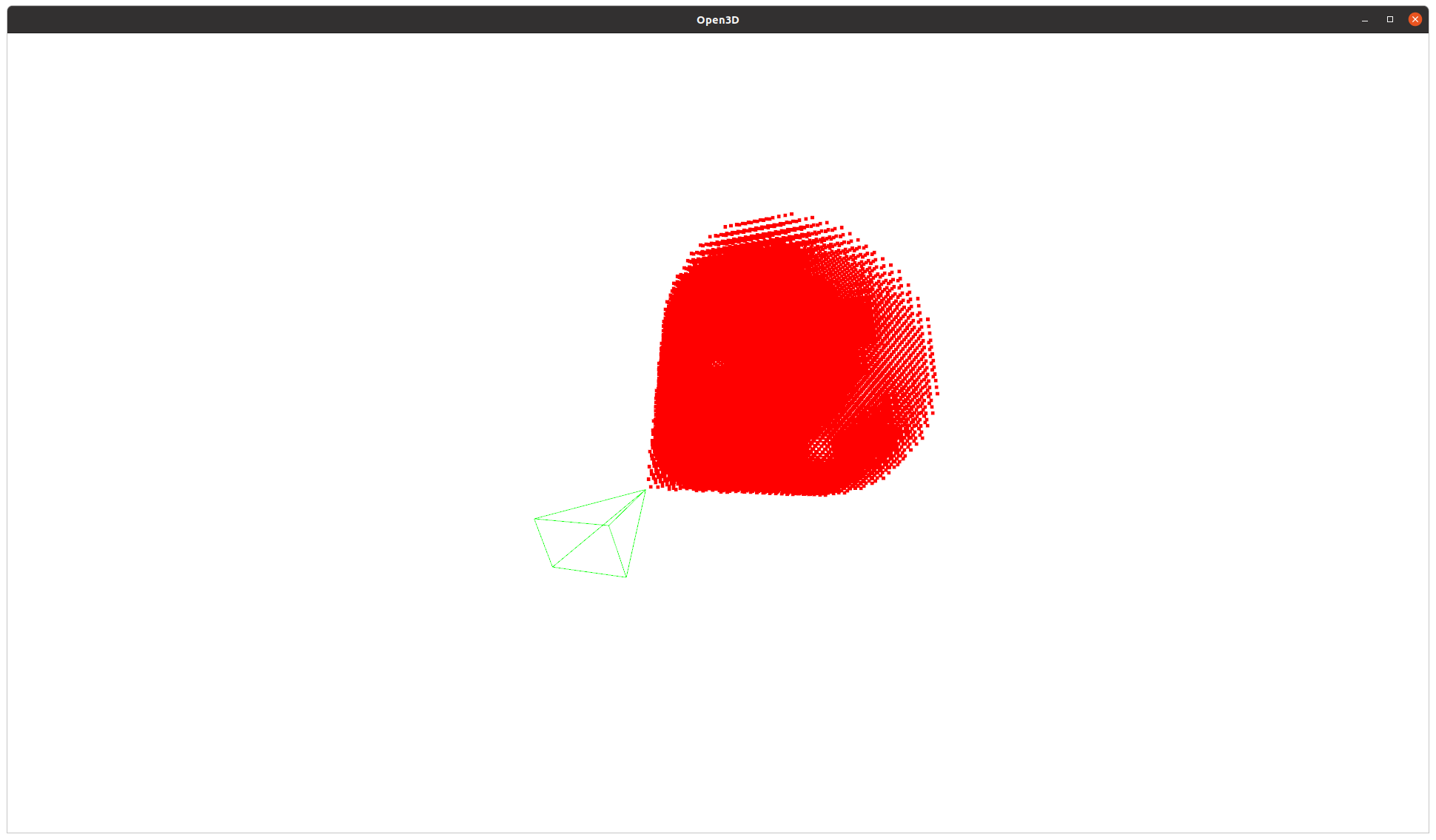
광각 카메라 모델 중 double sphere 모델을 보면 수식 상 다음과 같이 projection이 실패하는 조건이 있다.
 |  |
여기서 저 수식 (43)이 의미하는 범위가 대충 지금 광각 카메라가 표현할 수 있는 화각 범위 밖이라는 느낌은 오는데 정확히 어떤 형태인지가 궁금했다.
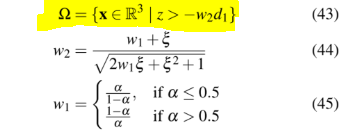
내가 캘리브레이션했었던 double sphere 모델 주변에 point를 채우고 수식(43) 조건에 필터링되는 point만 남기면 다음 그림과 같다.
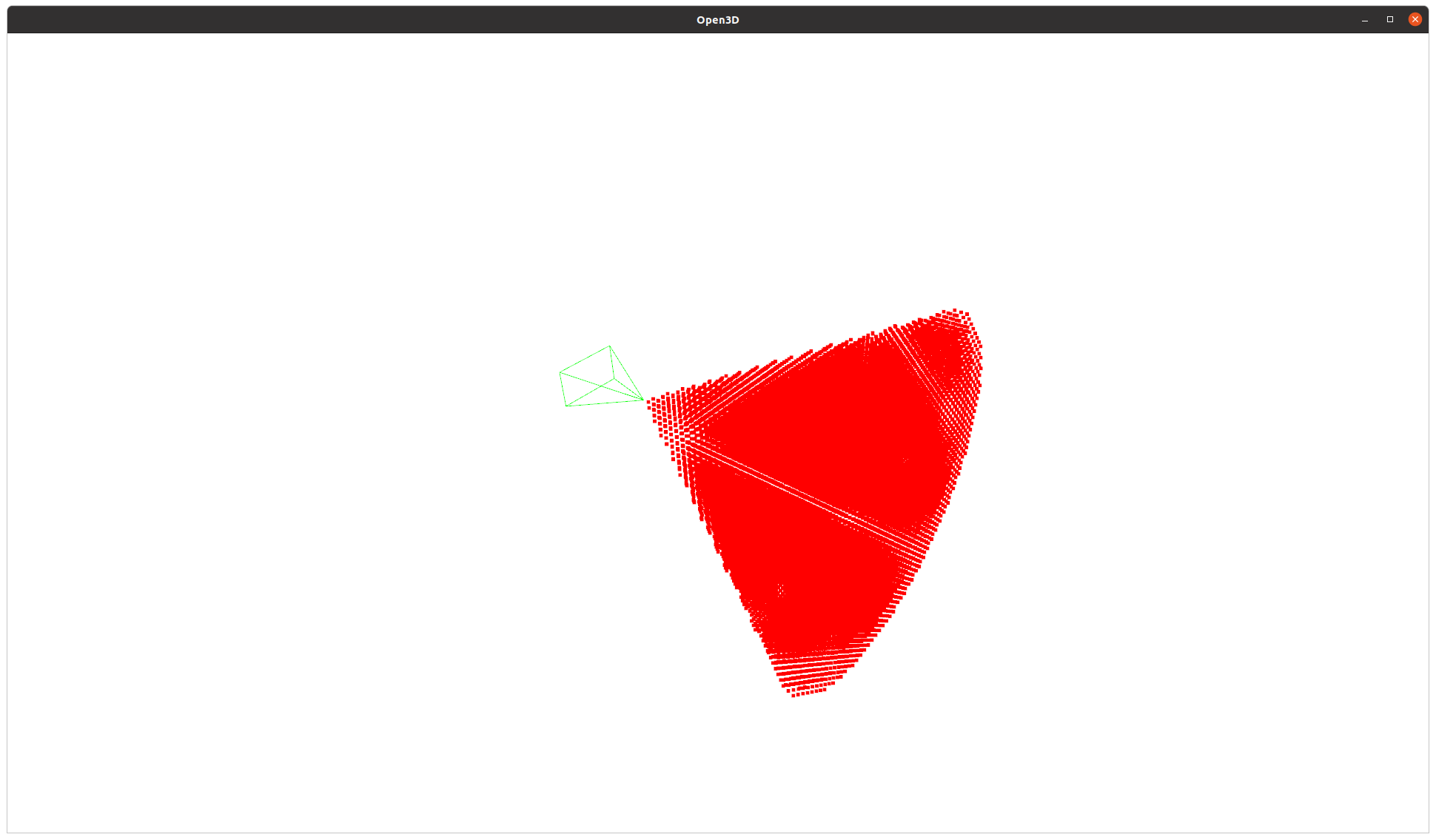
예상했던 것과 같이 카메라 뒤로 원뿔 형태로 퍼지는 영역이 잡힌다. 광각 이미지가 동심원을 그리듯 표현되어 있고 렌즈도 원이기 때문에 projection-failed 영역은 원뿔 모양이었다.
invalid projection 을 그냥 무시하고 구현을 해왔었는데 영역을 보니... 무조건 필터링해줘야 할 것 같다.
특히 최적화 과정에서 저 invalid region에서 발생하는 residual을 걸러주지 않으니 최적화가 잘 진행되지 않았다.
무조건 걸러주자. 만들어 둔데는 다 이유가 있다.
반응형
'Knowhow > Vision' 카테고리의 다른 글
| Opencv imread/imwrite vs PIL open/save speed 및 memory 비교 (0) | 2024.06.22 |
|---|---|
| COCO bounding box format, scale factor (0) | 2024.04.25 |
| Fisheye 카메라 모델도 solvePnP 이용해서 자세 초기화/추정하는 방법 (0) | 2024.02.28 |
| COLMAP[python] pycolmap 보다 편하게 colmap 사용하기 (0) | 2023.12.07 |
| RealityCapture camera coordinate to opencv(vision) camera coordinate (0) | 2023.12.06 |